Énergie, machinerie et technologies de communication
Laboratoires
Laboratoires - Énergie, machinerie et technologies de communication
Laboratoire de recherche Télébec en communications souterraines (LRTCS)Campus de Val-d'Or
Le Laboratoire de recherche Télébec en communications souterraines se destine à effectuer des recherches sur les communications dans les milieux confinés, sur les télécommunications dans les zones à faible densité d’utilisateurs et celles sans fil au contrôle de procédés, de machines et de robots. Les concepts et hypothèses théoriques, une fois élaborés, sont validés par des logiciels de simulations tels que : ADS, HFSS, CST, Matlab/Simulink et radio logicielle. Le laboratoire comprend aussi un analyseur de réseau, un analyseur de spectre, un générateur de spectre, station de soudure, une station d’inspection microscopique ainsi qu’une configuration de mesures automatisée pour la propagation 60 GHz. Par ailleurs, l'équipe de professeurs chercheurs en télécommunications de l'Université du Québec en Abitibi-Témiscamingue vise à se positionner au niveau mondial en recherche et en formation de personnel hautement qualifié en télécommunications sans fil.
Laboratoire de nanotechnologie et de bioplasturgieCampus de Rouyn-Noranda, local E-302
En vue de contribuer au développement durable par les sciences de l’ingénierie et des matériaux, le laboratoire de bioplasturgie et de nanotechnologie (LBN) effectue des travaux de pointe sur le développement d’une nouvelle génération de matériaux numériques et intelligents (composites et nanocomposites) pour des applications ciblées en plasturgie. Ces activités de recherche et de développement contribuent entre autres à la valorisation des résidus industriels végétaux dans des produits à haute valeur ajoutée et aux traitements phytosanitaires des biocomposites (structures en bois, bois, carton, emballages, produits biocomposites, etc.).
Laboratoire d'automatisation et de robotique Campus de Rouyn-Noranda, local E-305
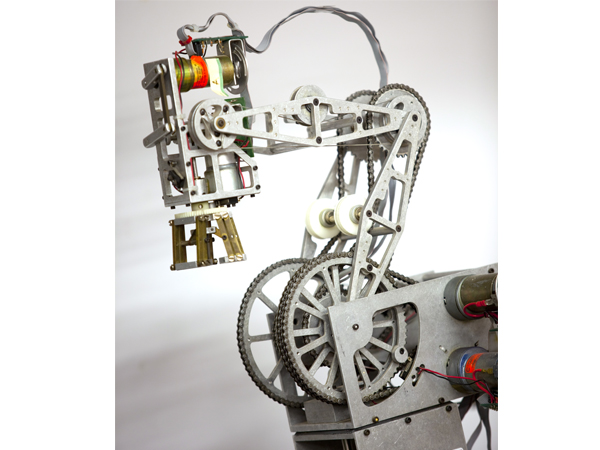
Les activités de recherche de ce laboratoire portent sur l’étude des robots manipulateurs rigides et à bras flexibles. En particulier, ce laboratoire permet la modélisation et la commande non linéaire, hiérarchique et adaptative de ces classes de robots. Ce laboratoire porte aussi sur la modélisation et la commande non linéaire des robots manipulateurs mobiles pour des applications dans le domaine minier.
Équipements disponibles :
- Robot manipulateur Motoman à 6 d.d.l
- Robot à un bras flexible
- Robot manipulateur à deux bras flexibles
- Une trancheuse de grand format pour cartes
- Robot mobile